Cum ajungi la clinica medicală privată din oraș unde vrei să-ți faci un control de rutină? Cum ajungi la hotelul din Paris unde ai făcut rezervare pentru o vacanță de o săptămână? Și cum estimezi timpul până la destinație în funcție de traseul pe care îl alegi și de traficul în timp real?
Indiferent de mijlocul de transport pe care îl folosești, sunt destul de sigur că răspunsurile tale la aceste întrebări au strânsă legătură cu GPS, sistemul global de poziționare prin satelit inventat de armata americană în 1973.
Cu toate acestea, primul sistem de navigație montat pe o mașină a apărut cu câțiva ani înainte ca armata Statelor Unite să ofere acces civililor la sistemul GPS. Și, în mod ironic, povestea a plecat tot de la o tehnologie militară. Mai exact, de la turela unui tanc japonez.
Un constructor japonez pe piața americană
Piața auto americană traversa o perioadă plină de schimbări la începutul anilor ‘70, iar constructorii autohtoni se simțeau amenințați din două direcții: pe de o parte, producători japonezi precum Toyota și Nissan începeau să câștige popularitate datorită unor modele cu un raport calitate-preț mai competitiv, în timp ce autoritățile naționale începeau o lungă perioadă de reglementare a industriei ca parte a primelor eforturi de a reduce poluarea.
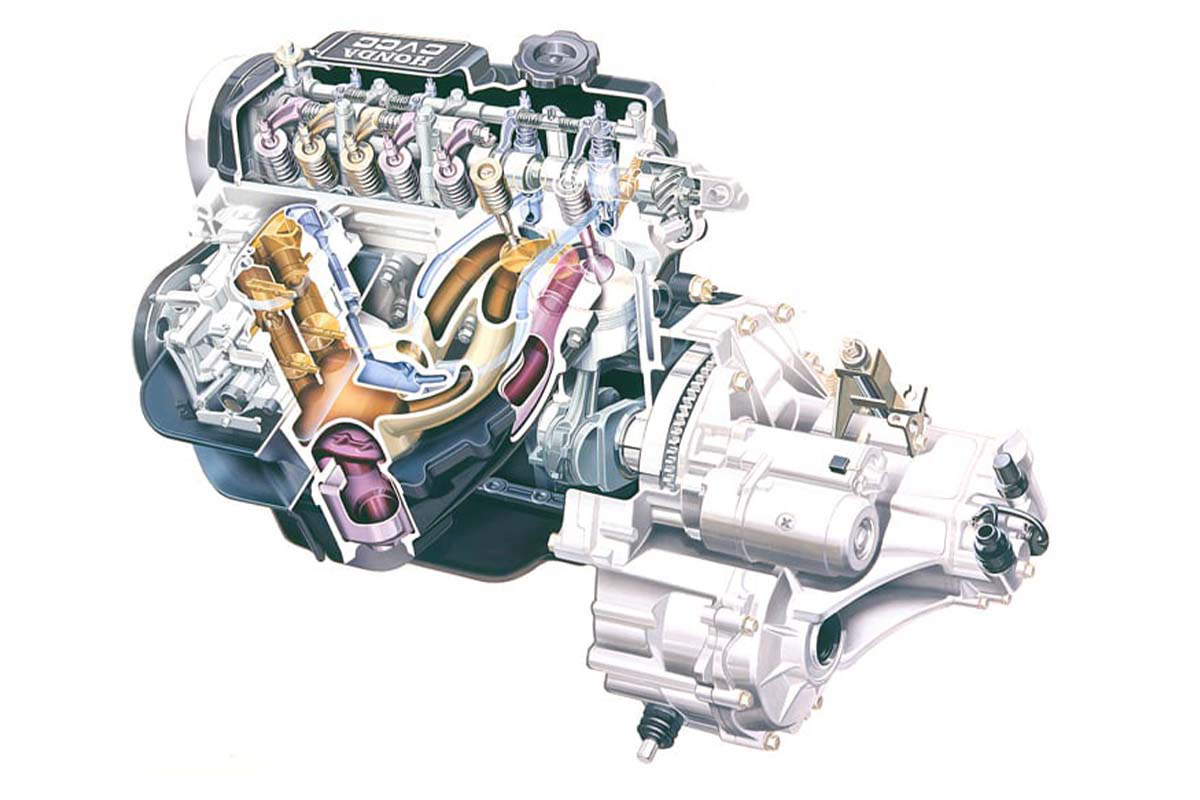
Honda era unul dintre producătorii japonezi prezenți pe piața americană, însă inițial succesul a fost unul limitat comparativ cu cel înregistrat de Toyota sau Nissan. În încercarea de a câștiga popularitate, Honda a decis să dezvolte primul motor cu combustie internă care respecta Clean Air Act, prima lege din SUA cu privire la calitatea aerului, care a apărut în 1963 și, începând din 1970, a inclus o serie de reglementări pentru industria auto.
Noul motor CVCC introdus în 1972 a fost apreciat pentru eficiența și emisiile scăzute pentru perioada respectivă, însă nu a fost suficient pentru ca Honda să câștige o cotă de piață relevantă. Tadashi Kume, directorul executiv al centrului de cercetare și dezvoltare al Honda, a intuit rapid motivele: industria auto punea deja accent pe dezvoltarea de sisteme electronice avansate pentru mașini.
Ceva trebuia schimbat, iar primul pas a fost numirea lui Katsutoshi Tagami la conducerea departamentului de sisteme electronice. Tagami nu avea niciun fel de experiență în industria auto, iar anterior fusese șeful unui departament de generatoare portabile.
Rolul tău este să ne aduci la nivelul celorlalți constructori și eventual să ajungem cu un pas înaintea lor.
Tadashi Kume, într-o conversație cu Katsutoshi Tagami.

O nouă strategie: automobilul inteligent
În ciuda lipsei sale de experiență în industria auto, Tagami a intuit că progresele în dezvoltarea sistemelor electronice vor permite în cele din urmă inginerilor să producă un autovehicul mai mult sau mai puțin autonom, pe baza unui sistem electronic capabil să controleze componente precum motorul, transmisia și direcția. Implicit, a presupus că autovehiculul va fi cumva capabil să selecteze automat pe o hartă traseul optim pentru a ajunge la destinație.
Tagami a inclus toate aceste idei într-un concept pe care l-a numit Automatically Adaptive and Creative Electronically Controlled System, iar una dintre exprimările cheie din cadrul acestui document a fost automobilul inteligent.
În cercetările sale, Tagami a plecat de la o idee inedită pe care a aflat-o de la superiorul său Kume. Acesta vizitase o bază de antrenament a Forțelor de Apărare din Japonia și observase că turela unui tanc rămâne permanent îndreptată spre țintă indiferent de denivelările peste care trece vehiculul cu șenile pe traseu. Acest comportament era determinat de un giroscop, un dispozitiv format dintr-un disc montat pe o bază care se poate roti liber pe cele trei axe ale sale fără să modifice direcția axei sale de rotație.
Inițial, Tagami s-a gândit să utilizeze giroscopul pentru îmbunătățirea suspensiilor. Giroscopul armatei japoneze era foarte precis, dar în același timp și foarte complex, cu peste 200 de componente, astfel că trebuia simplificat pentru a putea fi introdus pe un autovehicul.
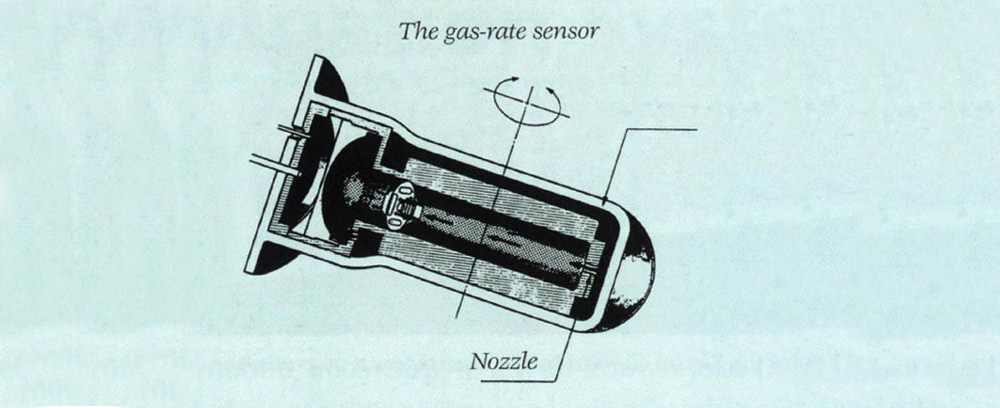
Echipa de ingineri de la Honda a reușit să dezvolte un giroscop cu debit de gaz cu numai opt componente, care funcționa pe principiul deplasării gazului în linie dreaptă atunci când o cantitate de heliu era injectată printr-o duză și suflată spre două fire încălzite. Prin detectarea diferențelor de temperatură dintre cele două fire, giroscopul determina schimbarea direcției.
Teoria era promițătoare, însă în practică rezultatele au fost modeste: precizia giroscopului cu debit de gaz era foarte mică, întrucât punctul zero de echilibru nu putea fi menținut în poziție fixă.
Integrarea tehnologiei într-un sistem de navigație
Soluția a venit în 1977 din partea unui inginer din echipă, care a propus ca giroscopul să fie utilizat pentru ghidarea mașinii pe o hartă, dacă punctul zero al giroscopului este ajustat constant la punctul de destinație.
Experimentul a avut succes pe baza unei demonstrații simple: inginerii au desenat o hartă pe o folie transparentă, au marcat un traseu cu markerul și au observat că giroscopul era capabil să urmeze ruta și să ghideze mașina. Ulterior, și-au dat seama că giroscopul putea să indice propria sa localizare pe baza traseului și a direcției în care merge mașina.

Singura problemă care rămânea de rezolvat era precizia giroscopului. Tagami a realizat că giroscopul cu debit de gaz trebuie produs în vacuum pentru a crește astfel puritatea heliului utilizat și, implicit, precizia. Nu a fost simplu să găsească un partener pentru un astfel de proiect, însă în cele din urmă producătorul de blocuri optice Stanley Electric a acceptat provocarea.
Ca inginer, directorul Stanley Electric a înțeles pasiunea noastră pentru a crea ceva nou. Ne-a sprijinit și a contrat obiecțiile din cadrul companiei. De fapt, ne-a salvat proiectul.
Tagami despre colaborarea cu Stanley Electric.
Cu un giroscop mai precis, pasul următor a fost testarea efectivă a tehnologiei pe o mașină. Sistemul implementat era alcătuit dintr-un ecran cu tub catodic (clasicul monitor CRT) care afișa puncte și linii pentru indicarea direcției, iar hărțile erau tipărite pe planșe transparente și poziționate pe ecran.
Ca șofer, rolul tău era să utilizezi indicatoarele sistemului pentru a seta poziția actuală a mașinii și punctul de destinație, iar poziția mașinii era actualizată în timp real. Pentru a ajunge la destinație trebuia practic să te uiți periodic pe ecran și să deduci singuri traseul optim, întrucât nu existau indicații în timp real cu privire la traseu. Un punct intermitent semnala poziția actuală, iar o linie punctată indica traseul parcurs deja de la pornirea mașinii.
Pentru a indica poziția actuală a mașinii pe traseu, sistemul folosea un microprocesor care prelua datele transmise de giroscop, iar informațiile despre viteza de deplasare și distanța parcursă erau deduse pe baza unor informații primite de la turațiile unei roți dințate instalată în cutia de viteze.
Pe parcursul testelor, inginerii au observat și o anomalie: pe același traseu abordat exista de fiecare dată o eroare în exact același punct. Cauza era reprezentată însă de un principiu banal de cartografiere numit deformare. De exemplu, pe o hartă la scara 1:100.000, un drum cu o lățime de 10 metri este reprezentat printr-o linie cu grosimea de 0,1 milimetri. Totuși, în cazul intersecțiilor, harta ar fi dificil de interpretat din cauza intersectării mai multor linii de 0,1 milimetri, motiv pentru care reprezentarea la scara este ignorată.
În zilele noastre, pe un sistem de navigație precum Google Maps, această problemă de scalare se rezolvă simplu prin funcția de zoom in care se activează automat în apropierea intersecțiilor.
Testul final a avut loc pe traseul Suzuka – Tokyo în 1981 și a fost folosit chiar de Kume, care a plecat spre locuința personală din Tokyo în urma unei întâlniri cu dealerii din Suzuka. Sistemul a funcționat cu precizie, motiv pentru care Kume a decis că acesta poate fi introdus pe vehicule de serie.
Honda Accord, primul model cu sistem de navigație
Conducerea Honda a decis că modelul potrivit pentru integrarea primului sistem de navigație pentru mașini din lume este Accord, o compactă care tocmai ajunsese la a doua generație. De altfel, decizia s-a bazat și pe faptul că Accord era acum produs pentru prima oară în Statele Unite, la o uzină din Marysville, Ohio. Modelul era echipat cu un motor CVCC de 1,5 litri cu 110 cai putere, iar printre noutățile de la interior se numărau ornamente din velur și accente cromate.
Sistemul de navigație Honda Electro Gyrocator era disponibil opțional pentru aproximativ 2.750 de dolari, sumă care în prezent, pe baza inflației, reprezintă echivalentul a circa 9.200 de dolari. La vremea respectivă, sistemul de navigație reprezenta un cost de de circa 25% din prețul de bază al noii generații Accord.
Pe lângă sistemul hardware, clientul primea la pachet și un set de hărți pentru Statele Unite printat pe folii transparente. Practic, atunci când pleca la drum, șoferul trebuia să aleagă harta potrivită pentru traseul pe care urma să-l parcurgă și să o monteze pe ecran. Urma apoi selecția poziției de plecare și punctul de destinație.
Decizia de a introduce sistemul de navigație pe acest model s-a dovedit una inspirată: timp de 15 ani, Accord a fost cea mai vândută mașină japoneză pe piața americană.

În 1983, la doi ani de la apariția primului sistem de navigație pe o mașină și în plin Război Rece, un avion de pasageri al companiei Korean Air Lines care decolase din New York cu destinația Seul a pătruns accidental în spațiul aerian al Uniunii Sovietice. Forțele Aeriene Sovietice au considerat că este un avion de spionaj american și l-au doborât cu o rachetă. Acesta s-a prăbușit în Marea Japoniei, iar toți cei 269 de pasageri au fost declarați morți.
În urma tragediei, pentru a evita repetarea unui astfel de scenariu, președintele american Ronald Reagan a semnat un decret prin care sistemul de poziționare prin satelit GPS dezvoltat de armata americană în 1973 a devenit accesibil, cu anumite limitări, și pentru societatea civilă.
De aici și până la dezvoltarea unui sistem de navigație pentru mașini bazat pe sistemul GPS au mai trecut doar câțiva ani: în 1990, un sistem de navigație bazat pe datele furnizate de sistemul GPS a devenit disponibil pe modelul Eunos Cosmo produs de Mazda și comercializat exclusiv pe piața japoneză.